Robootika distantsõppe õppekava II kooliastmele LEGO Spike roboti baasil
tase A
Õppekava eesmärgid
- suurendada õpilaste huvi loodus-, täppisteaduste ja tehnoloogia valdkonna õppimise vastu
ja suunata noori elukutse valikul; - arendada tehnoloogiaalaseid teadmisi ja oskusi läbi uurimuslikku ja disainipõhise
lähenemise; - toetada õpilase arengut, iseseisvust, omaalgatust, aktiivsust ning koostöö- ja kommunikatsioonioskusi;
- pakkuda noortele eduelamusi ja tunnustust ning toetada nende sisemist motivatsiooni.
Õpitulemused:
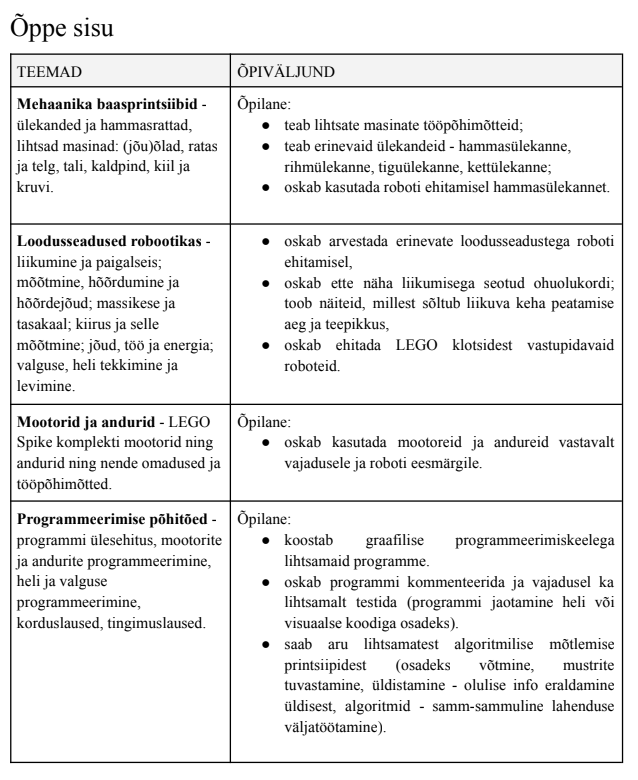
- teab mehaanika baasprintsiipe;
- oskab kasutada loodusseadusi robootikas eakohasel tasemel;
- oskab ehitada LEGO klotsidest vastupidavaid roboteid ning kasutada mootoreid ja
andureid vastavalt vajadusele ja roboti eesmärgile; - koostab graafilise programmeerimiskeelega lihtsamaid programme;
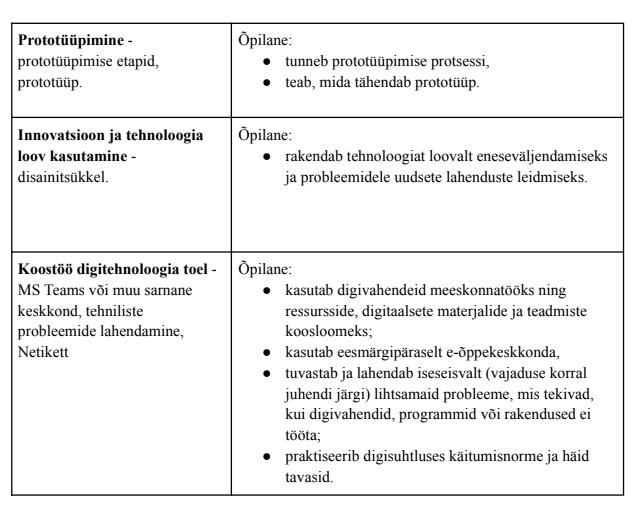
- tunneb prototüüpimise protsessi;
- rakendab tehnoloogiat loovalt eneseväljendamiseks ja probleemidele uudsete lahenduste
leidmiseks; - kasutab digivahendeid meeskonnatööks ning ressursside, digitaalsete materjalide ja
teadmiste koosloomeks.
Õpitulemused saavutatakse läbi praktiliste tööde tegemise, programmeerimisülesannete lahendamise, koostöö ülesannetest osavõtmise.
Tagasisidestamine
Tagasisidestamine ja õppija enesehindamine toimub erinevaid meetodeid ( nt vestlus, praktiline
ülesanne, test) kasutades ning erinevates õppeetappides. Tagasisidestamine ja õppija
enesehindamine viiakse läbi seatud õpieesmärkide ja edukriteeriumite alusel. Tagasiside andmise
eesmärgiks eelkõige on õppija õppimise toetamine. Meeskondlike ülesannete puhul on
tagasisidestajateks ka meeskonnaliikmed.
Tagasisidet antakse roboti ehitusele ja programmile, ehitamise ja programmide koostamise
protsessile, meeskonnatöö tegemisele, digipädevusele.
Õppekavale sisenemiseks vajalikud eelteadmised
Õppekava järgi saavad õppima asuda 4.-6. klassi õpilased, kellel on huvi robootika, inseneeria
ning probleemülesannete lahendamise vastu. Varasem kokkupuude robootikaga ei ole vajalik.
Distantsõppe vorm eeldab infotehnoloogiliste vahendite kasutamise oskust.
Õppe korraldus ja õppekava tundide jaotus
Õppe maht on ühe õppeaasta jooksul 64 akadeemilist tund. Õppeaasta algab reeglina septembri
kolmandast nädalast ja lõpeb mai lõpus ning kestab maksimaalselt 32 õppenädalat. Õpet viiakse
läbi distantsõppe vormis. Distantsõpe jaotub sünkroonõppe/asünkroonõppe ning iseseisva töö
vahel järgmiselt: sünkroonne/asünkroonne õpe 60 ak/t ja iseseisev töö 4 ak/t.
Õppetöö vormid:
1) sünkroonne õpe, kus õpetamine ja õppimine toimub kõigil samal ajal;
- tunnid videosilla abil (kord nädalas kokkulepitud ajal kestvusega kuni kaks akadeemilist
tundi)
Sünkroonõppe tundi kasutada keerukamate tegevuste tegemise jaoks ning koostööks ja tagasiside
andmiseks.
2) asünkroonne õpe (kui õpilane ei saa osaleda sünkroonõppes)
- iseseisev töö ettevalmistatud juhendite abil (maht kuni kaks akadeemilist tundi
õppenädala jooksul)
3) iseseisev töö
- Iseseisev töö on õppija poolt iseseisvalt kindlate eesmärkidega töö- ja õppeülesannete
täitmine, mille kohta õpetaja annab tagasisidet.
Lõpetamise tingimused: praktilised tööd on täidetud 75% mahus.
Õppegrupi suurus: 8-10 õpilast.
Õppetöö läbiviimise keskkond:
Microsoft 365 Education
Arvutile esitatavad nõudmised:
Windows 1.5 GHz Intel® Core Duo protsessor – samaväärne või parem 4 GB RAM 2 GB vaba kõvakettaruumi Bluetooth 4.0 või rohkem Operatsioonisüsteem: Windows 10, versioon 1803 või uuem | macOS 1.5 GHz Intel® Core Duo protsessor – samaväärne või parem 4 GB RAM 2 GB kõvaketta ruumi Bluetooth 4.0 või rohkem Operatsioonisüsteem: macOS Mojave 10.14 või uuem |
| Õpilase poolt osalemiseks vajalikud vahendid: | Õpilasele õppe läbimiseks Eesti Teadushuvihariduse Liidu poolt kasutamiseks antavad vahendid: |
|
Grupi B puhul oleks soovitav lisaks õpilase arvuti veebikaamerale kogu klassi näitav veebikaamera. |
Juhendajale vajalikud vahendid ja tarkvara
Juhendajal olemas:
- Arvuti veebikaamera ja mikrofoniga
- Internetiühendus
- Nutiseade pildistamiseks ja filmimiseks
- Vaba põrandapinda arvuti lähedal roboti katsetamiseks.
- Arvutisse paigaldatud MS Teams või muu kokkulepitud keskkond
- Tarkvara arvutis (tasuta allalaadimine): https://education.lego.com/en-us/downloads/spike-prime/software
Õppe korraldaja tagab juhendajale õppes
osalemiseks:
- LEGO Education robootika baaskomplekt: Spike Prime (juhul, kui juhendajal puudub isiklik vahend).
- Robootika harjutusmatt
- Microsoft 365 Education või muu kokkulepitud keskkonna kasutamise
litsents, et läbi viia 90 minutiline tund ning jagada õppes kasutatavat materjali.
Juhised:
Tehakse kättesaadavaks õpilasele läbi Microsoft 365 Education keskkonna.
Juhendid:
videod, töölehed, tunnid videosilla vahendusel.
Õppe sisu
Aastakava mahus 60 ak/h (distantsõppe piloteerimise käigus läbitakse aastakava 46 ak/h mahus):
| Õppenädal | Õppeaasta jooksul käsitletavad teemad | Osaoskused | Tundide arv |
| 1. | Sissejuhatus: komplektiga tutvumine, põhimõisted. Õppetöö korraldus, osalejatega tutvumine. Osalejate teadmiste, oskuste, uskumuste ja huvidega tutvumine. Õppijate ootuste kuulamine. | 2 | |
| 2. | Tervitusroboti ehitamine ja programmeerimine (Greetings, Earthling) | Robotiehitus: erinevad struktuurid (kolmnurk, rööpkülik) Programmeerimine: Kahe mootori töö, programmi üldpõhimõtted | 2 |
| 3. | Spike Konn | Robotiehitus: ehitusjuhendi lugemine Programmeerimine: Kahe mootori töö, programmi üldpõhimõtted, roboti käivitamine kontrollerilt, Wait plokk. | 2 |
| 4. | Liikuv robot (Silly Walks) | Robotiehitus: Veermik, raskuskese Programmeerimine: mootorite töö, programmi üld põhimõtted | 2 |
| 5. | Katapult (Ball Launcher) | Robotiehitus: kang (jõuõla pikkuse muutmine Programmeerimine: mootorite töö, korduse plokid | 2 |
| 6. | Nukushow (Tantsiv robot) | Robotiehitus: kang Programmeerimine: mootorite töö, värvianduri kasutamine, alamprogrammid) | 2 |
| 7. | Astronaudi tööriistad (Astronaut Tools) | Robotiehitus: hammaslatt, hammasülekanne Programmeerimine: mootorite töö, kaugusanduri ja värvianduri kasutamine. | 2 |
| 8. | Robot kokk (RoboChef) | Robotiehitus: kiirendav hammasülekanne Programmeerimine: mootorite töö, kaugusanduri ja värvianduri kasutamine. | 2 |
| 9. | Spike ninasarvik (puuteandur, kaks sammu sissepoole tants) | Robotiehitus: puuteanduri kasutamine robotil Programmeerimine: mootorite töö, kaugusanduri ja värvianduri kasutamine. | 2 |
| 10. | Spike robotkäsi | Robotiehitus: puuteandru, hoovad Programmeerimine: mootorite töö, puuteanduri kasutamine. | 2 |
| 11. | Kiikuv robot | Robotiehitus: ehitusjuhendi järgi ehitatud roboti täiendamine Programmeerimine: mootorite töö, andmete kogumine, joondiagramm | 2 |
| 12. | Loovtöö, ise roboti ehitamine, erinevate andurite kasutamine | Robotiehitus: ise ehitatud robot Programmeerimine: mootorite töö, kaugusanduri ja värvianduri kasutamine. | 2 |
| Vaheaeg | |||
| 13. | Spike CNC masin | Robotiehitus: veakontroll ja toote parendamine Programmeerimine: Keerukam mootorite sünkroonis juhtimine | 2 |
| 14. | Spike seif | Robotiehitus: toote parendamine Programmeerimine: Programmi arendamine | 2 |
| 15. | Spike värvianduri kasutamine, ülesanded harjutusmatil | Robotiehitus: anduri asetuse mõju robotile Programmeerimine: Värvianduri erinevad kasutusvõimalused | 2 |
| 16. | Joonejärgimise robot, ülesanded harjutusmatil | Robotiehitus: Joonejärgimise robot põhimõtted Programmeerimine: Joonejärgimies erinevad algoritmid | 2 |
| 17. | Spike kaugusanduri kasutamine, ülesanded harjutusmatil | Robotiehitus: anduri asetuse mõju robotile Programmeerimine: kaugusanduri erinevad kasutusvõimalused | 2 |
| 18. | Võistlusroboti ehitamise põhimõtted ja nüansid | Robotiehitus: mitme punkti kinnitused, kaablite paigaldus, raskuskese, liikumine seina äärtes, Programmeerimine: mootorite töö, andurite kasutamine | 2 |
| 19. | Jälitav robot (sumo alge), ülesanded harjutusmatil | Robotiehitus: sumorobot põhimõtted Programmeerimine: Sumo roboti erinevad algoritmid | 2 |
| 20. | Kiirendusrobot | Robotiehitus: kiirendusroboti põhimõtted, hammasülekanne Programmeerimine: mootorite töö | 2 |
| 21. | Mäkketõusu robot | Robotiehitus: mäkketõusu roboti põhimõtted, hammasülekanne Programmeerimine: mäkketõusu roboti erinevad algoritmid | 2 |
| 22. | Oma toote disain | Robotiehitus: ise ehitatud robot Programmeerimine: mootorite töö, kaugusanduri ja värvianduri kasutamine. | 2 |
| 23. | Oma toote disaini esitlemine ja kokkuvõte | Robotiehitus: ise ehitatud robot Programmeerimine: mootorite töö, kaugusanduri ja värvianduri kasutamine. | 2 |
| Piloteerimise lõpp | |||
| 24. | Platsipuhastus | Robotiehitus: roboti juhtimine ja täppissõit, lisadetailide juurde ehitamine Programmeerimine: mootorite ja andurite töö | 2 |
| 25. | Jõuluteemalise roboti ehitamine | 2 | |
| 26. | Robotite teatejooks | Robotiehitus: roboti juhtimine ja täppissõit, lisadetailide juurde ehitamine Programmeerimine: mootorite töö | 2 |
| 27. | Raskuse tõmbamise robot | Robotiehitus: roboti juhtimine ja täppissõit, lisadetailide juurde ehitamine Programmeerimine: mootorite töö | 2 |
| 28. | Vaba teema kavandamine | Ajurünnakud, meeskonnatöö, disain, ideekorje | 2 |
| 29. | Vaba teema, ehitamine ja programmeerimine, testimine, parendamine | Prototüübi ehitamine ja testimine | 2 |
| 30. | Vaba teema töö esitlemine. Kokkuvõttev tund. | Robotiehitus: ise ehitatud robot Programmeerimine: mootorite töö, kaugusanduri ja värvianduri kasutamine. | 2 |
| 31. | Vaba teema, ehitamine ja programmeerimine, testimine, parendamine (leiuta ise perereis jaoks transpordi vahend). Esitlemine.* | Prototüübi ehitamine ja testimine. Kõige eelneva õpitu kordamine. | 2 |
32. Kokkuvõttev tund. Kordamine. Esitluste
tagasisidestamine (2)
Õppemaht kokku 64
* Kasuta neid tunde õppeaasta jooksul, kui lapsed on ise leiutamiseks valmis
Õppekava piloteerimist viib läbi Eesti Teadushuvihariduse Liit.